❖本調査レポートの見積依頼/サンプル/購入/質問フォーム❖
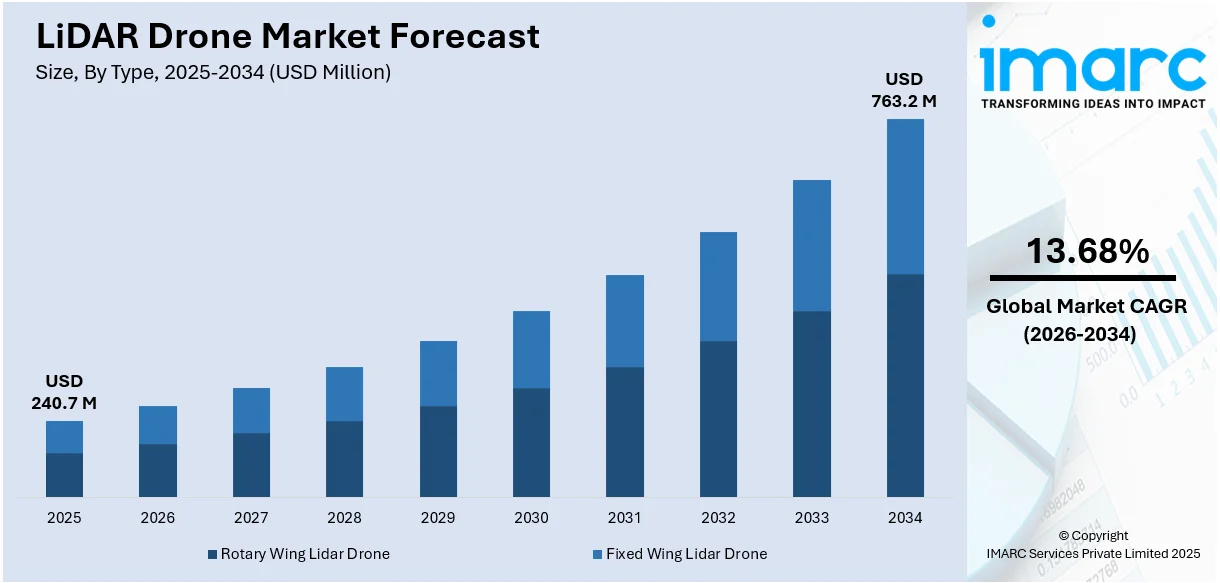
LiDARドローン市場は、2025年に2億4070万米ドルに達し、2034年には7億6320万米ドルへと大幅な成長を遂げると予測されています。この期間(2026年から2034年)における年平均成長率(CAGR)は13.68%と見込まれており、高解像度マッピングと測量への需要の高まり、世界的な建設およびインフラ開発活動の拡大、そして地形図における3Dモデルの利用増加が、この市場を牽引する主要因となっています。
LiDAR(光検出と測距)ドローンとは、LiDARセンサーを搭載した無人航空機(UAV)のことで、レーザー光線を発射し、その反射時間からドローンと周辺の物体との距離を精密に測定します。具体的には、ドローンのLiDARセンサーから放たれたレーザー光線が物体に当たり、反射してドローンに戻るまでの時間を計測することで、物体までの距離を正確に算出します。これらのLiDARセンサーを搭載したドローンは、様々な地形や景観の高精度な3Dマップやモデルを作成するためのマッピングおよび測量目的で広く利用されています。マルチレーザースキャン技術により、ドローンは非常に詳細な3D点群データを生成することができ、これを用いて精緻な3Dマップやモデルを構築することが可能です。LiDARドローンによるデータ収集は、従来の測量手法と比較して、はるかに高い精度と速度、そして効率性を提供します。また、広大なエリアを短時間で効率的に網羅し、人間が立ち入るのが困難な危険地域やアクセスが難しい場所でも、安全かつ正確にデータを収集できるという大きな利点があります。
市場の主なトレンドとしては、遠隔地、危険地帯、アクセス困難な地域における高解像度マッピングと測量への需要が著しく増加している点が挙げられます。これは、エネルギー資源の探査において頻繁かつ精密な地質調査が不可欠となっている石油・ガス探査活動の活発化に起因しています。これと並行して、世界中で拡大する建設およびインフラ開発活動、例えば都市開発、道路建設、橋梁点検など、多岐にわたるプロジェクトでLiDARドローンの効率性と精度が評価され、その採用が促進されています。さらに、洪水、地震、土砂崩れなどの自然災害発生時における迅速な被害状況把握や、事前のリスク評価、復旧計画策定において、LiDARドローンが重要な役割を果たすことが期待されており、災害管理と自然災害のリスク評価の改善に対する需要の高まりも、市場に好影響を与えています。
加えて、LiDAR技術自体の継続的な進化も市場成長の強力な推進力です。具体的には、測定精度のさらなる向上、太陽光などの外乱に強いアンチグレア機能の搭載、そしてセンサーデータと人工知能(AI)やモノのインターネット(IoT)技術との統合が進んでおり、これによりLiDARドローンの応用範囲と性能が飛躍的に拡大し、新たなビジネスチャンスを生み出しています。この他にも、電気自動車(EV)の普及に伴う充電インフラの整備や、自動運転車の開発における高精度な地図データ作成、障害物検知システムへのLiDAR技術の応用も、市場に新たな需要をもたらし、ポジティブな影響を与えています。地形マッピングにおける3Dモデルの利用増加も市場をさらに活性化させています。各国政府が推進するスマートシティ構想においても、都市インフラの効率的な管理、交通最適化、環境モニタリングなどの目的で、LiDARドローンによる高精度な都市空間データの取得が不可欠とされており、その需要を強力に後押ししています。さらに、農業分野では、作物分析や精密農業のための高解像度地理空間データ取得にLiDAR技術が急速に利用されており、農地の状態把握、収穫量予測、病害虫の早期発見などに貢献し、市場の多様な成長を促しています。
IMARC Groupの最新レポートは、世界のLiDARドローン市場が2026年から2034年までの予測期間において、非常に力強く、かつ前向きな成長を遂げるとの見通しを示しています。この市場の顕著な拡大は、主に急速な都市化の進展、製品における継続的な革新、可処分所得水準の着実な上昇、そして広範な研究開発(R&D)活動といった複数の要因によって推進されています。本レポートは、世界のLiDARドローン市場における主要なトレンドを分析し、グローバル、地域、および国レベルでの詳細な予測を提供しています。市場は、タイプ、コンポーネント、レンジ、アプリケーションという主要なセグメントに基づいて綿密に分類され、それぞれの動向が深く掘り下げられています。
タイプ別セグメンテーションでは、ロータリーウィングLiDARドローンと固定ウィングLiDARドローンが主要なカテゴリとして詳細に分析されています。この分析の結果、ロータリーウィングLiDARドローンが市場において最も大きなシェアを占めるセグメントであることが明確に示されています。
コンポーネント別では、LiDARドローンを構成する主要な要素として、レーザースキャナー、ナビゲーションおよび測位システム、カメラ、そしてその他のコンポーネントが挙げられます。これらの構成要素の中で、レーザースキャナーが市場で最も大きなセグメントを形成していることが報告されています。
レンジ別セグメンテーションでは、LiDARドローンの測定範囲に応じて、短距離、中距離、長距離のカテゴリに分けられています。この分類において、短距離LiDARドローンが市場で最も大きな割合を占めるセグメントとして特定されています。
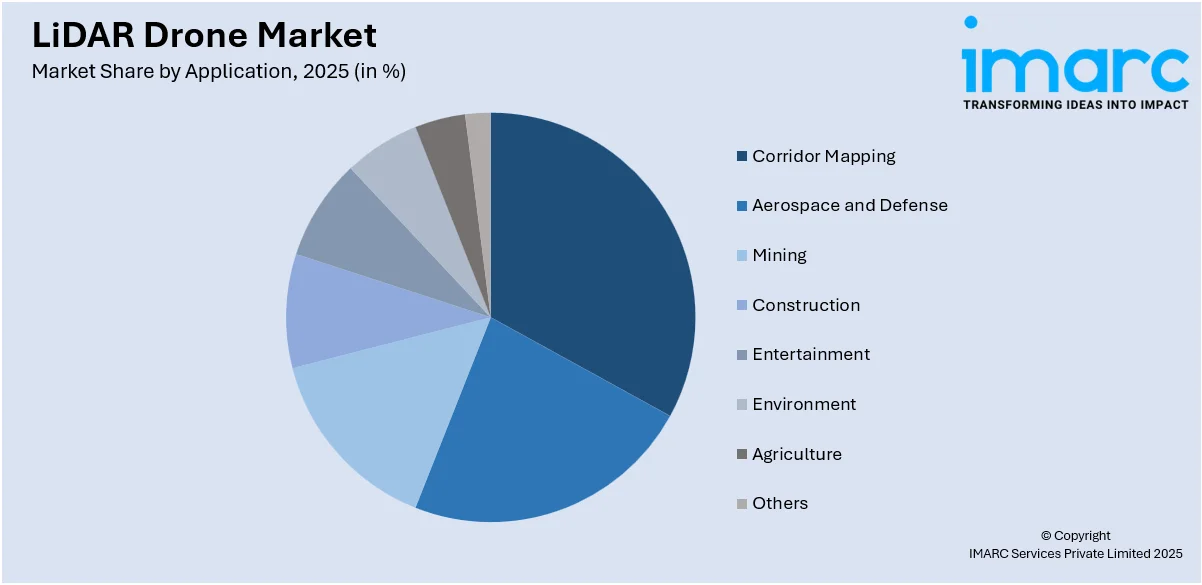
アプリケーション別では、LiDARドローンが活用される多岐にわたる分野が詳細に分析されています。これには、コリドーマッピング、航空宇宙・防衛、鉱業、建設、エンターテイメント、環境、農業などが含まれます。これらの多様な用途の中で、コリドーマッピングがLiDARドローン市場において最大の市場シェアを占めていることが示されています。
地域別分析では、世界の主要な地域市場が包括的に評価されています。具体的には、北米(米国、カナダ)、アジア太平洋(中国、日本、インド、韓国、オーストラリア、インドネシアなど)、ヨーロッパ(ドイツ、フランス、英国、イタリア、スペインなど)、ラテンアメリカ(ブラジル、メキシコなど)、そして中東・アフリカが含まれます。これらの地域の中で、北米がLiDARドローンにとって最大の市場として際立っています。北米市場の力強い成長は、急速な工業化、LiDAR技術における継続的な技術進歩、そして多数の主要プレーヤーの存在といった要因によって強力に推進されています。
さらに、本レポートでは、世界のLiDARドローン市場における競争環境についても、市場構造や主要企業の戦略的動向を含む詳細かつ包括的な分析が提供されており、市場参加者にとって貴重な洞察を提供しています。
LiDARドローン市場レポートは、2020年から2034年までのLiDARドローン市場に関する包括的な定量分析を提供します。本レポートは、2025年を基準年とし、2020年から2025年までの過去期間と、2026年から2034年までの予測期間を対象としており、市場規模は百万米ドル単位で評価されます。
レポートの主要なスコープには、市場の歴史的および予測トレンドの徹底的な探求、業界を牽引する要因(カタリスト)と直面する課題の綿密な分析が含まれます。さらに、以下の主要セグメントごとの詳細な歴史的および予測的な市場評価が提供されます。
* **タイプ別:** 回転翼LiDARドローン、固定翼LiDARドローン
* **コンポーネント別:** レーザースキャナー、ナビゲーション・測位システム、カメラ、その他関連機器
* **範囲別:** 短距離、中距離、長距離
* **アプリケーション別:** 回廊マッピング、航空宇宙・防衛、鉱業、建設、エンターテイメント、環境モニタリング、農業、その他多岐にわたる用途
* **地域別:** アジア太平洋、ヨーロッパ、北米、ラテンアメリカ、中東・アフリカ。これらの地域内では、米国、カナダ、ドイツ、フランス、英国、イタリア、スペイン、中国、日本、インド、韓国、オーストラリア、インドネシア、ブラジル、メキシコといった主要国の市場動向も詳細に分析されます。
本レポートでは、AEVEX Aerospace、Delair、Leica Geosystems AG (Hexagon AB)、Lidarusa、Microdrones (mdGroup)、OnyxScan、Phoenix LiDAR Systems、RIEGL Laser Measurement Systems GmbH、Teledyne optech Inc. (Teledyne Technologies Inc.)、Velodyne LiDAR Inc.、Yellowscanなど、市場を牽引する主要企業の詳細なプロファイルが提供されています(これは一部のリストであり、完全なリストはレポートに含まれています)。これらの企業に関する情報には、市場シェア、プレーヤーのポジショニング、トップの勝利戦略、競争ダッシュボード、および企業評価象限が含まれ、競争環境の全体像を把握できます。
ステークホルダーにとっての主なメリットは以下の通りです。
IMARCのレポートは、LiDARドローン市場の様々なセグメント、過去および現在の市場トレンド、市場予測、そして2020年から2034年までの市場ダイナミクスに関する包括的な定量分析を提供します。
この調査研究は、世界のLiDARドローン市場における市場の推進要因、課題、機会に関する最新かつ重要な情報を提供します。
主要な地域市場および最も急速に成長している地域市場を特定し、各地域内の主要な国レベルの市場を特定することを可能にします。これにより、戦略的な投資機会や事業拡大の可能性を評価できます。
ポーターの5フォース分析は、新規参入者、競争上のライバル関係、サプライヤーの力、買い手の力、および代替品の脅威の影響を評価するのに役立ち、LiDARドローン業界内の競争レベルとその魅力を深く分析するのに貢献します。
競争環境の分析により、ステークホルダーは自社の競争環境を明確に理解し、市場における主要プレーヤーの現在の位置付けに関する貴重な洞察を得ることができます。
レポートは、10%の無料カスタマイズ、販売後の10〜12週間の専門アナリストサポートを提供し、PDFおよびExcel形式で電子メールを通じて配信されます(特別な要求に応じてPPT/Word形式の編集可能なバージョンも提供可能です)。
1 序文
2 範囲と方法論
2.1 調査目的
2.2 関係者
2.3 データソース
2.3.1 一次情報源
2.3.2 二次情報源
2.4 市場推定
2.4.1 ボトムアップアプローチ
2.4.2 トップダウンアプローチ
2.5 予測方法論
3 エグゼクティブサマリー
4 世界のLiDARドローン市場 – 序論
4.1 概要
4.2 市場動向
4.3 業界トレンド
4.4 競合情報
5 世界のLiDARドローン市場の展望
5.1 過去および現在の市場動向 (2020-2025)
5.2 市場予測 (2026-2034)
6 世界のLiDARドローン市場 – タイプ別内訳
6.1 ロータリーウィングLiDARドローン
6.1.1 概要
6.1.2 過去および現在の市場動向 (2020-2025)
6.1.3 市場セグメンテーション
6.1.4 市場予測 (2026-2034)
6.2 固定翼LiDARドローン
6.2.1 概要
6.2.2 過去および現在の市場動向 (2020-2025)
6.2.3 市場セグメンテーション
6.2.4 市場予測 (2026-2034)
6.3 タイプ別魅力的な投資提案
7 世界のLiDARドローン市場 – コンポーネント別内訳
7.1 レーザースキャナー
7.1.1 概要
7.1.2 過去および現在の市場動向 (2020-2025)
7.1.3 市場セグメンテーション
7.1.4 市場予測 (2026-2034)
7.2 ナビゲーションおよび測位システム
7.2.1 概要
7.2.2 過去および現在の市場動向 (2020-2025)
7.2.3 市場セグメンテーション
7.2.4 市場予測 (2026-2034)
7.3 カメラ
7.3.1 概要
7.3.2 過去および現在の市場動向 (2020-2025)
7.3.3 市場セグメンテーション
7.3.4 市場予測 (2026-2034)
7.4 その他
7.4.1 過去および現在の市場動向 (2020-2025)
7.4.2 市場予測 (2026-2034)
7.5 コンポーネント別魅力的な投資提案
8 世界のLiDARドローン市場 – 範囲別内訳
8.1 短距離
8.1.1 概要
8.1.2 過去および現在の市場動向 (2020-2025)
8.1.3 市場セグメンテーション
8.1.4 市場予測 (2026-2034)
8.2 中距離
8.2.1 概要
8.2.2 過去および現在の市場動向 (2020-2025)
8.2.3 市場セグメンテーション
8.2.4 市場予測 (2026-2034)
8.3 長距離
8.3.1 概要
8.3.2 過去および現在の市場動向 (2020-2025)
8.3.3 市場セグメンテーション
8.3.4 市場予測 (2026-2034)
8.4 範囲別魅力的な投資提案
9 世界のLiDARドローン市場 – 用途別内訳
9.1 回廊マッピング
9.1.1 概要
9.1.2 過去および現在の市場動向 (2020-2025)
9.1.3 市場セグメンテーション
9.1.4 市場予測 (2026-2034)
9.2 航空宇宙および防衛
9.2.1 概要
9.2.2 過去および現在の市場動向 (2020-2025)
9.2.3 市場セグメンテーション
9.2.4 市場予測 (2026-2034)
9.3 鉱業
9.3.1 概要
9.3.2 過去および現在の市場動向 (2020-2025)
9.3.3 市場セグメンテーション
9.3.4 市場予測 (2026-2034)
9.4 建設
9.4.1 概要
9.4.2 過去および現在の市場動向 (2020-2025)
9.4.3 市場セグメンテーション
9.4.4 市場予測 (2026-2034)
9.5 エンターテイメント
9.5.1 概要
9.5.2 過去および現在の市場動向 (2020-2025)
9.5.3 市場セグメンテーション
9.5.4 市場予測 (2026-2034)
9.6 環境
9.6.1 概要
9.6.2 過去および現在の市場動向 (2020-2025)
9.6.3 市場セグメンテーション
9.6.4 市場予測 (2026-2034)
9.7 農業
9.7.1 概要
9.7.2 過去および現在の市場動向 (2020-2025)
9.7.3 市場セグメンテーション
9.7.4 市場予測 (2026-2034)
9.8 その他
9.8.1 過去および現在の市場動向 (2020-2025)
9.8.2 市場予測 (2026-2034)
9.9 用途別魅力的な投資提案
10 世界のLiDARドローン市場 – 地域別内訳
10.1 北米
10.1.1 米国
10.1.1.1 市場推進要因
10.1.1.2 過去および現在の市場動向 (2020-2025)
10.1.1.3 タイプ別市場内訳
10.1.1.4 コンポーネント別市場内訳
10.1.1.5 範囲別市場内訳
10.1.1.6 用途別市場内訳
10.1.1.7 主要企業
10.1.1.8 市場予測 (2026-2034)
10.1.2 カナダ
10.1.2.1 市場推進要因
10.1.2.2 過去および現在の市場動向 (2020-2025)
10.1.2.3 タイプ別市場内訳
10.1.2.4 コンポーネント別市場内訳
10.1.2.5 範囲別市場内訳
10.1.2.6 用途別市場内訳
10.1.2.7 主要企業
10.1.2.8 市場予測 (2026-2034年)
10.2 欧州
10.2.1 ドイツ
10.2.1.1 市場促進要因
10.2.1.2 過去および現在の市場動向 (2020-2025年)
10.2.1.3 タイプ別市場内訳
10.2.1.4 コンポーネント別市場内訳
10.2.1.5 範囲別市場内訳
10.2.1.6 用途別市場内訳
10.2.1.7 主要企業
10.2.1.8 市場予測 (2026-2034年)
10.2.2 フランス
10.2.2.1 市場促進要因
10.2.2.2 過去および現在の市場動向 (2020-2025年)
10.2.2.3 タイプ別市場内訳
10.2.2.4 コンポーネント別市場内訳
10.2.2.5 範囲別市場内訳
10.2.2.6 用途別市場内訳
10.2.2.7 主要企業
10.2.2.8 市場予測 (2026-2034年)
10.2.3 英国
10.2.3.1 市場促進要因
10.2.3.2 過去および現在の市場動向 (2020-2025年)
10.2.3.3 タイプ別市場内訳
10.2.3.4 コンポーネント別市場内訳
10.2.3.5 範囲別市場内訳
10.2.3.6 用途別市場内訳
10.2.3.7 主要企業
10.2.3.8 市場予測 (2026-2034年)
10.2.4 イタリア
10.2.4.1 市場促進要因
10.2.4.2 過去および現在の市場動向 (2020-2025年)
10.2.4.3 タイプ別市場内訳
10.2.4.4 コンポーネント別市場内訳
10.2.4.5 範囲別市場内訳
10.2.4.6 用途別市場内訳
10.2.4.7 主要企業
10.2.4.8 市場予測 (2026-2034年)
10.2.5 スペイン
10.2.5.1 市場促進要因
10.2.5.2 過去および現在の市場動向 (2020-2025年)
10.2.5.3 タイプ別市場内訳
10.2.5.4 コンポーネント別市場内訳
10.2.5.5 範囲別市場内訳
10.2.5.6 用途別市場内訳
10.2.5.7 主要企業
10.2.5.8 市場予測 (2026-2034年)
10.2.6 その他
10.2.6.1 過去および現在の市場動向 (2020-2025年)
10.2.6.2 市場予測 (2026-2034年)
10.3 アジア太平洋
10.3.1 中国
10.3.1.1 市場促進要因
10.3.1.2 過去および現在の市場動向 (2020-2025年)
10.3.1.3 タイプ別市場内訳
10.3.1.4 コンポーネント別市場内訳
10.3.1.5 範囲別市場内訳
10.3.1.6 用途別市場内訳
10.3.1.7 主要企業
10.3.1.8 市場予測 (2026-2034年)
10.3.2 日本
10.3.2.1 市場促進要因
10.3.2.2 過去および現在の市場動向 (2020-2025年)
10.3.2.3 タイプ別市場内訳
10.3.2.4 コンポーネント別市場内訳
10.3.2.5 範囲別市場内訳
10.3.2.6 用途別市場内訳
10.3.2.7 主要企業
10.3.2.8 市場予測 (2026-2034年)
10.3.3 インド
10.3.3.1 市場促進要因
10.3.3.2 過去および現在の市場動向 (2020-2025年)
10.3.3.3 タイプ別市場内訳
10.3.3.4 コンポーネント別市場内訳
10.3.3.5 範囲別市場内訳
10.3.3.6 用途別市場内訳
10.3.3.7 主要企業
10.3.3.8 市場予測 (2026-2034年)
10.3.4 韓国
10.3.4.1 市場促進要因
10.3.4.2 過去および現在の市場動向 (2020-2025年)
10.3.4.3 タイプ別市場内訳
10.3.4.4 コンポーネント別市場内訳
10.3.4.5 範囲別市場内訳
10.3.4.6 用途別市場内訳
10.3.4.7 主要企業
10.3.4.8 市場予測 (2026-2034年)
10.3.5 オーストラリア
10.3.5.1 市場促進要因
10.3.5.2 過去および現在の市場動向 (2020-2025年)
10.3.5.3 タイプ別市場内訳
10.3.5.4 コンポーネント別市場内訳
10.3.5.5 範囲別市場内訳
10.3.5.6 用途別市場内訳
10.3.5.7 主要企業
10.3.5.8 市場予測 (2026-2034年)
10.3.6 インドネシア
10.3.6.1 市場促進要因
10.3.6.2 過去および現在の市場動向 (2020-2025年)
10.3.6.3 タイプ別市場内訳
10.3.6.4 コンポーネント別市場内訳
10.3.6.5 範囲別市場内訳
10.3.6.6 用途別市場内訳
10.3.6.7 主要企業
10.3.6.8 市場予測 (2026-2034年)
10.3.7 その他
10.3.7.1 過去および現在の市場動向 (2020-2025年)
10.3.7.2 市場予測 (2026-2034年)
10.4 ラテンアメリカ
10.4.1 ブラジル
10.4.1.1 市場促進要因
10.4.1.2 過去および現在の市場動向 (2020-2025年)
10.4.1.3 タイプ別市場内訳
10.4.1.4 コンポーネント別市場内訳
10.4.1.5 範囲別市場内訳
10.4.1.6 用途別市場内訳
10.4.1.7 主要企業
10.4.1.8 市場予測 (2026-2034年)
10.4.2 メキシコ
10.4.2.1 市場促進要因
10.4.2.2 過去および現在の市場動向 (2020-2025)
10.4.2.3 タイプ別市場内訳
10.4.2.4 コンポーネント別市場内訳
10.4.2.5 範囲別市場内訳
10.4.2.6 用途別市場内訳
10.4.2.7 主要企業
10.4.2.8 市場予測 (2026-2034)
10.4.3 その他
10.4.3.1 過去および現在の市場動向 (2020-2025)
10.4.3.2 市場予測 (2026-2034)
10.5 中東およびアフリカ
10.5.1 市場促進要因
10.5.2 過去および現在の市場動向 (2020-2025)
10.5.3 タイプ別市場内訳
10.5.4 コンポーネント別市場内訳
10.5.5 範囲別市場内訳
10.5.6 用途別市場内訳
10.5.7 国別市場内訳
10.5.8 主要企業
10.5.9 市場予測 (2026-2034)
10.6 地域別魅力的な投資提案
11 世界のLiDARドローン市場 – 競争環境
11.1 概要
11.2 市場構造
11.3 主要企業別市場シェア
11.4 市場プレーヤーのポジショニング
11.5 主要な成功戦略
11.6 競争ダッシュボード
11.7 企業評価象限
12 主要企業のプロファイル
12.1 AEVEX Aerospace
12.1.1 事業概要
12.1.2 製品ポートフォリオ
12.1.3 事業戦略
12.1.4 財務状況
12.1.5 SWOT分析
12.1.6 主要なニュースとイベント
12.2 Delair
12.2.1 事業概要
12.2.2 製品ポートフォリオ
12.2.3 事業戦略
12.2.4 SWOT分析
12.2.5 主要なニュースとイベント
12.3 Leica Geosystems AG (Hexagon AB)
12.3.1 事業概要
12.3.2 製品ポートフォリオ
12.3.3 事業戦略
12.3.4 SWOT分析
12.3.5 主要なニュースとイベント
12.4 Lidarusa
12.4.1 事業概要
12.4.2 製品ポートフォリオ
12.4.3 事業戦略
12.4.4 SWOT分析
12.4.5 主要なニュースとイベント
12.5 Microdrones (mdGroup)
12.5.1 事業概要
12.5.2 製品ポートフォリオ
12.5.3 事業戦略
12.5.4 財務状況
12.5.5 SWOT分析
12.5.6 主要なニュースとイベント
12.6 OnyxScan
12.6.1 事業概要
12.6.2 製品ポートフォリオ
12.6.3 事業戦略
12.6.4 SWOT分析
12.6.5 主要なニュースとイベント
12.7 Phoenix LiDAR Systems
12.7.1 事業概要
12.7.2 製品ポートフォリオ
12.7.3 事業戦略
12.7.4 SWOT分析
12.7.5 主要なニュースとイベント
12.8 RIEGL Laser Measurement Systems GmbH
12.8.1 事業概要
12.8.2 製品ポートフォリオ
12.8.3 事業戦略
12.8.4 財務状況
12.8.5 SWOT分析
12.8.6 主要なニュースとイベント
12.9 Teledyne optech Inc. (Teledyne Technologies Inc.)
12.9.1 事業概要
12.9.2 製品ポートフォリオ
12.9.3 事業戦略
12.9.4 財務状況
12.9.5 SWOT分析
12.9.6 主要なニュースとイベント
12.10 Velodyne LiDAR Inc.
12.10.1 事業概要
12.10.2 製品ポートフォリオ
12.10.3 事業戦略
12.10.4 SWOT分析
12.10.5 主要なニュースとイベント
12.11 Yellowscan
12.11.1 事業概要
12.11.2 製品ポートフォリオ
12.11.3 事業戦略
12.11.4 SWOT分析
12.11.5 主要なニュースとイベント
13 世界のLiDARドローン市場 – 業界分析
13.1 促進要因、阻害要因、および機会
13.1.1 概要
13.1.2 促進要因
13.1.3 阻害要因
13.1.4 機会
13.1.5 影響分析
13.2 ポーターの5つの力分析
13.2.1 概要
13.2.2 買い手の交渉力
13.2.3 供給者の交渉力
13.2.4 競争の程度
13.2.5 新規参入の脅威
13.2.6 代替品の脅威
13.3 バリューチェーン分析
14 戦略的提言
15 付録

LiDARドローンとは、レーザー光を照射し、その反射時間から対象物までの距離を高精度に測定するLiDAR(Light Detection and Ranging)センサーを搭載した無人航空機(ドローン)の総称でございます。この技術により、地形、構造物、植生など、地上のあらゆる対象物の詳細な三次元点群データを効率的かつ正確に取得することが可能となります。特に、植生が密な場所でも地表面のデータを透過的に取得できる点が大きな特徴でございます。
LiDARドローンにはいくつかの種類がございます。一つは、既存の汎用ドローンにLiDARセンサーユニットを後付けする「ペイロード型」で、柔軟な運用が可能ですが、センサーの重量や消費電力に制約を受ける場合があります。もう一つは、ドローン本体とLiDARセンサーが一体設計された「統合型」で、システム全体が最適化されており、軽量化や安定したデータ取得に優れています。また、使用するレーザーの波長によっても分類され、複数の波長を用いることで物質の特性まで識別できる「マルチスペクトルLiDAR」も開発されております。スキャン方式では、一点ずつ測定するシングルポイント方式から、広範囲を効率的に測定するマルチポイント方式が主流でございます。
LiDARドローンの用途は多岐にわたります。最も一般的なのは「測量・マッピング」で、建設現場の土量計算、地形測量、高精度な三次元地図作成などに利用されます。また、「インフラ点検」では、橋梁、送電線、風力タービンなどの構造物の劣化状況や変形を非接触で詳細に把握し、点検作業の安全性と効率性を向上させます。「森林管理・農業」分野では、森林資源量の調査、樹高測定、病害虫の早期発見、精密農業における生育状況のモニタリングなどに貢献いたします。「防災・災害調査」では、土砂災害のリスク評価や、地震・洪水などの被災状況を迅速に把握し、復旧活動に役立てられます。さらに、都市計画における建物モデルの作成や、考古学における植生下の遺跡発見など、幅広い分野での応用が進んでおります。
関連技術としては、まずドローンの正確な位置情報を提供する「GNSS(Global Navigation Satellite System)」が不可欠でございます。RTK(Real Time Kinematic)やPPK(Post Processed Kinematic)といった技術を用いることで、センチメートル級の高精度な位置情報を実現し、LiDARデータの精度を飛躍的に向上させます。また、ドローンの姿勢や動きを測定する「IMU(Inertial Measurement Unit)」は、LiDARセンサーの向きや速度の変動を補正し、正確な点群データを生成するために重要です。GNSSが利用できない環境下では、「SLAM(Simultaneous Localization and Mapping)」技術が活用され、LiDARデータと自己位置推定を同時に行いながらマッピングを可能にします。取得された膨大な点群データを解析・可視化するためには、「点群処理ソフトウェア」が必須であり、近年では「AI(人工知能)」や「機械学習」を活用して、点群データからの物体認識、分類、特徴抽出を自動化する研究も盛んに行われております。これらの技術が複合的に連携することで、LiDARドローンの能力は最大限に引き出され、様々な社会課題の解決に貢献している状況でございます。